Elektrituulikuks nimetatakse mõiste kontekstis tuuleturbiinist, ajamist, generaatorist, juhtimissüsteemist ja tornist koosnevat süsteemi, mis muundab tuule kineetilise energia elektrienergiaks. Mitmest elektrituulikust ning tuulikuid omavahel ja neid liitumispunktiga ühendavatest seadmetest, ehitistest ning rajatistest koosnevat elektrijaama nimetatakse tuulepargiks. 1
Üldist
Tuule kasutamine energiakandjana on ajalooliselt üks vanimaid tehnoloogiaid ning olnud paljuski kasutusel tuuleveskitena ja purjede jõul liikuva laevatranspordi näol kuni tööstusliku revolutsioonini 19. sajandil. Esimene elektrit tootev tuulik ehitati 1891 Taani leiutaja Poul la Cour poolt. Atmosfäärinähtusena on tuul meie piirkonnas kapriisne, kuid sagedane ning õnneks mitte liiga tugev. Need omadused mõjutavad ka tuule kasutamist energiakandjana. Nii tuulikute kui tuulegeneraatorite puhul on kõige olulisemaks teguriks tuule kiirus – kiiruse kasvades kaks korda suureneb muundatava energia hulk kaheksa korda. Selleks, et püüda kiiremat tuult, on lihtsaim võimalus tõsta tuult püüdev tiivik kõrgemale, kuna tänu pinnavormidest põhjustatud turbulentside vähenemisele puhub ülemistes õhukihtides tugevam ja stabiilsem tuul. Seetõttu moodustavad mastid koos generaatori ja tiivikuga ühtse koosluse. 2
Tuulegeneraatorite summaarne tootmisvõimsus on aastakümnete jooksul üleilmselt kasvanud stabiilses tempos, küündides 2019. a. lõpuks 622 408 MW-ni, millest 50,5% paikneb kahes juhtivas riigis: Hiinas ja USAs. Euroopa Liidus on juhtival kohal Saksamaa, mille võimsus on 60 840 MW, mis annab talle globaalses konkurentsis kolmanda koha (9,8% maailma tuulikutest paikneb seal). Eesti koguvõimsus oli 2019. aastal 320 MW. Põhjalikuma ülevaate tuuleenergiast Eestis saab artiklist Tuuleenergia ressurss. 3
Elektrituulik - tööpõhimõte ja ülesehitus
Tööpõhimõte
Elektrituulikute lihtsustatud tööpõhimõtteks on rakendada liikuva õhu energiat ning muuta see elektrienergiaks. Elektrienergia tootmiseks on kasutusel aerodünaamilist tõstejõudu kasutavad tuulegeneraatorid ning nendeks on enamjaolt horisontaalse teljega (vt Tuulikute tüübid) ja kolme- või kahetiivalised tiivikud. Esmalt hakkab tiivik pöörlema - gondli keres asub aeglaselt pöörlev võll, käigukast (või aeglaselt pöörlev generaator), kiirelt pöörlev võll ning generaator. Pöörlevad labad panevad aeglaselt pöörleva võlli pöörlema ning seda kiirusel 30 - 60 pööret minutis. Aeglaselt pöörlev võll on kiirelt pöörleva võlliga hammasratasühenduse abil ühendatud. Need tõstavad kiirelt pöörleva võlli pöörlemiskiiruse 1000 kuni 1800 pöördeni minutis. Kiirelt pöörlev võll paneb käima elektrienergiat tootva generaatori, mille väljundvõimsus suunatakse transformaatorisse, mis muundab selle laiemas elektrivõrgus kasutatavale pingele vastavaks. 4
Elektrituulikute puhul on neli olulisimat faktorit, mis määravad turbiini toodetava elektrienergia koguse 5:
- 1) Võimsus – 2019 aasta seisuga jääb uute installeeritute tuulikute keskmine tootmisvõimsus maismaatuulikute puhul 3,1 MW ja meretuulikute puhul 7,2 MW juurde. Tulevikus oodatakse 20-30 MW tuulegeneraatorite kerkimist 6 ;
- 2) Tuule kiirus - tugevamad tuuled toodavad rohkem energiat. Elektrituulikud toodavad energiat, kui tuule kiirus on 4–30 m/s;
- 3) Labade raadius - mida suurem on labade raadius, seda rohkem energiat on võimalik toota. Labapikkuse kahekordistamine võib tagada lausa neli korda suurema tootlikkuse;
- 4) Õhutihedus - merepinnast allpool asuvates paikades on õhurõhk kõrgem ning seetõttu on säärased kohad tuulikute kasutamiseks soodsamad. Merepinnast kõrgemal asuvates paikades on õhurõhk madalam ning seetõttu on need tuulikute kasutamiseks vähemsoodsad.
Ülesehitus
Olenemata tüübist (vt tuulikute tüübid) saab tuulegeneraatori põhikomponentideks pidada järgnevaid osasid 78:
- a) torn (tower) - tornide pikkused varieeruvad olenevalt tuuliku tüübist (40-meetristest enam kui 100-meetristeni välja). Tavaliselt on torn valmistatud sorditerasest – odavamaks alternatiiviks on sõrestik- või betoontornid;
- b) tiivikulabad - (blades)- üle 100 meetri (pikim laba - 107 m 9) ulatuda võivad labad on optimiseeritud ja disainitud vastavalt tulevase tuulepargi asukoha tuuletingimustele. Nende tootmiseks kasutatakse liitmaterjale, enamasti klaaskiu ja epoksüvaigu segusid. Epoksüvaigu asemel võib koostematerjaliks olla ka polüester ning süsinikkiud, mis lisavad labadele vastupidavust ja jäikust;
- c) tiivikurumm (hub)- Elektrituuliku pöörlev osa, mille külge on kinnitatud labad;
- d) põhivõll (main shaft)- rootori e tiivikuga ühendatud aeglaselt pöörlev võll, mis kannab tiiviku pöörlemisel tekkiva jõu üle käigukastile;
- e) rootor ehk tiiviku võll (rotor) - Tuuliku pöörlev osa, mis koosneb rummust ja selle külge kinnitatud labadest. Tänapäeval on enim levinud kolme labaga rootorid, aga ehitatakse ka kahe ja ühe labaga rootoreid;
- f) turbiini alus (foundation)- tuuliku alus peab olema piisavalt vastupidav, et kõiki tuuliku mehhanisme toetada, olemata aga seejuures ise liiga raske;
- g) käigukast (gear box)- jõuülekandeseade, mis suurendab võlli pöörlemiskiirust, et toota elektrit;
- h) generaator (generaator)- muundab mehaanilise energia elektrienergiaks. Kasutusel on nii sünkroonsed kui ka asünkroonsed generaatorid;
- i) lengerdussüsteem e pöörav mootor (yaw motor)- mootor, mis pöörab gondli tuulega sobivasse suunda, et tuul puhuks rootoriga risti;
- j) transformaator (transformer)- muundab tuuliku toodetud elektrienergia elektrivõrgu jaoks kõrgepingeenergiaks;
- k) pidurdussüsteem (brakes) - ketaspidurid peatavad vajadusel tuuliku liikumise;
- l) gondel (nacelle/gondola) - Horisontaalteljelise tuuliku korpus.
- m) kontroller - Seade, mis võimaldab tuulikul töötada seni, kuni on saavutatud soovitud tuulekiirus. Tuulik lülitub välja, kui tuule kiirus ületab maksimaalse lubatud kiiruse;
- n) juhtimissüsteem (control system) - Elektrooniline süsteem, mille eesmärgiks on tuuliku töö reguleerimine, kontrollimine ja andmete kogumine. Süsteem saadab kogu informatsiooni elektrituulikus või ettevõtte kontoris asuvasse arvutisse;
Elektrituulikute tüübid
Tuulegeneraatoreid saab liigitada mitmel erineval moel (nt rootori orientatsiooni, tuulekiiruse e Reynolds’i numbri, labade arvu, paiknemise jne järgi).10 Esmalt on käsitletud rootori orientatsioonist lähtuvat kategoriseerimist, mis hõlmab endas kolme põhikategooriat:
- 1) horisontaalse teljega tuulikud;
- 2) vertikaalse teljega tuulikud;
- 3) kaldteljega tuulikud.
Tuuliku labade ja rootori disainimisel mängib olulist rolli teatud asukoha tuulekiirus. Nimelt, turbiinid, mis paiknevad väiksema tuulekiirusega aladel, vajavad suuremaid labasid, et ammutada võrdväärset energiahulka võrreldes suurema tuulekiirusega paikades paiknevate tuulikutega. 11 Tuulekiiruse järgi saab tuulikuid klassifitseerida kolme (vahel ka nelja12) erinevasse klassi (vt allolevasse tabelisse13).
|
I (tugev tuul) |
II (keskmine tuulekiirus) |
III (madal tuulekiirus) |
IV (väga madal tuulekiirus) |
|
|---|---|---|---|---|
|
Aastane keskmine tuulekiirus (m/s) |
10 |
8,5 |
7,5 |
6 |
|
50 aasta kõrgeim tuulekiirus 10 minuti vältel (m/s) |
50 |
42,5 |
37,5 |
30 |
|
50 aasta kõrgeim tuulekiirus 3 sekundi vältel (m/s) |
70 |
59,5 |
52,5 |
42 |
Horisontaalteljega tuulikud
Horisontaalteljega tuulikud ehk ka horisontaalvõlliga tuulikud on tuulikutüüpidest kõige levinumad ning kulutõhusamad nii Eestis kui maailmas kõikides tuulikute võimsusklassides. Need tuulikud eristuvad vertikaalteljega tuulikutest paralleelselt tuulevooluga/maapinnaga paikneva võlli poolest ning olenevalt tuulde keeramise järgi, nende tuulikute turbiinid võivad omada kahte tüüpi rootoreid: allatuult ja vastutuult. 14 Vastutuult turbiinidel on tiivik eespool ning need on vaid vähesel määral mõjutatud tornist põhjustatud turbulentsi poolt.15 Allatuult turbiinid on suhteliselt harvaesinevad aga on võimelised kasutama ka alt üles puhuvaid tuuli. Ujuvalustele kinnitatud tuulikute puhul võib nimetatud tehnoloogia osutuda eelistatuks, kuna lisab stabiilsust ja turvalisust kogu konstruktsioonile.1617
Horisontaalteljega tuulikuid saab jagada omakorda järgnevalt18:
- 1) Lihttuulik (bare wind turbine)
- 2) Hajutiga tuulik (diffuser-augmented wind turbine, DAWT)
Lihttuuliku puhul on tegemist laialdaselt kasutatud tuulikuga, milles kasutatakse ainult tuulest tulenevat kineetilist energiat ning mille korral on olulised suuremad tuulekiirused (joonis 1). Hajutiga tuulikud on suureks uurimisobjektiks Jaapanis, kus need on ka juba poolel teel kommertsialiseerimisele. DAWT tüüpi tuulikuid iseloomustab tuuliku efektiivsust suurendav konstruktsiooni ümbritsev lehter. Seega on neid tuulikuid võimalik kasutada ka väiksematel tuulekiirustel ning madalamatel kõrgustel, kuna lisatud tehnoloogia abil on tuule liikumine turbiinist ülesvoolu kiirendatud (vt joonis 2). 1920
|
Joonis 1. Horisontaalteljega elektrituulik36 |
|
|

|
Joonis 2. Hajutiga tuulik 37 |
|
|

Vertikaalteljega tuulikud
Vertikaalteljega tuulikuid, mida kasutatakse peamiselt väikeste tootmisvõimsuste puhul, on pöördetelg tuulevoolu/maapinna suhtes vertikaalne. Turbiinid ei sõltu tuule suunast ja mõned suudavad toota elektrit nii väikese tuulekiiruse kui ka madala müratasemega, muutes need eriti sobivaks linnapiirkondadele. Kuna raskeid tuuliku komponente on võimalik paigaldada maa vahetusse lähedusse, siis on neid tuulikuid lihtsam hooldada ja kergem konstruktsioon aitab kaasa stabiilsusele ja turvalisusele tornis, mille tõttu peetakse seda tehnoloogiat ujuvalustel paiknevate meretuulikute jaoks soodsaks. 21 Samuti puudub tihtipeale seda sorti tuulikutel lengerdussüsteem. Kuid mis puutub energia muundamise efektiivsusesse, siis vertikaalvõlliga turbiinid jäävad alla horisontaalteljega tuulikutele. Samuti on nende puhul raske kontrollida pöörlemiskiirust. 22 Vertikaalteljega tuulikud jagunevad omakorda järgnevalt 23:
- 1) Savonius tüüpi tuulikud
- 2) Darrieus tüüpi tuulikud
Savoniuse tüüpi vertikaalteljega tuulikute, ehk teisisõnu ka S-tüüpi rootoriga tuulikute leiutajaks oli S.J. Savonius. Savoniuse tuuleturbiin on poolsilindrilise kujuga, mis kinnitatakse vertikaalse võlli vastaskülgedele. Seda tüüpi tuulikud töötavad kasutades ära õhutakistust - tuuliku anumatüüpi labad püüavad tuult selliselt, et see surub tuuliku laba pöörlema. Kõige optimaalsem labade arv seda sorti tuulikutel on kaks. Kuna turbiin töötab tõmbejõuga, siis see ei ole võimeline pöörelema kiiremini kui tuulekiirus, mis muudab nad suhteliselt ebaefektiivseks. Kuid võrreldes suurte tuulikutega, ei vaja Savoniuse tuulikud suuri tuulekiiruseid tööle hakkamiseks, mistõttu sobivad nad ideaalselt linnatingimustesse. Savoniuse tuulikute kasuks räägib ka suhteliselt vaikne töötamine, lihtne ehitus ja väikesed mõõtmed. Illustratiivselt on Savoniuse tüüpi elektrituulik esitatud joonisel 3. 24
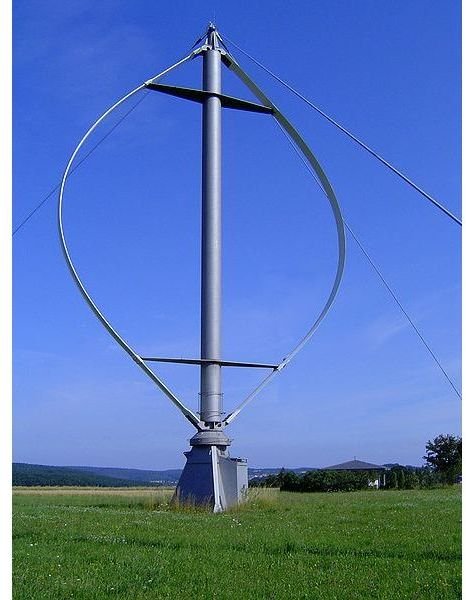
Darrieus tüüpi tuulik on vertikaalteljelise tuuliku tüüp, mille töötas välja prantslane G. J. M. Darrieus 1920ndatel aastatel. Rootor meenutab oma välimuselt visplit, mille küljes on kaks või neli õhukest sümmeetrilist tuuliku laba. Labad on kinnitatud nii masti tipust kui ka masti alumisest otsast. Tuuliku liikuma panemiseks on tarvis käivitavat mootorit. Erinevalt Savonius tüüpi tuulikutest kasutavad seda tüüpi tuulikud oma töös tõstejõudu. Seetõttu on ka Darrieuse tuulik tulenevalt teisest tööpõhimõttest võimeline pöörlema kiiremini kui tuulekiirus, mistõttu on sel ka suurem kasutegur (Darrieuse tüüpi tuulikute kasutegur ulatub 75%-ni horisontaalse teljega tuuliku omast, Savoniuse tuulikul on sama näitaja 25%). Lisaks veel on seda tüüpi tuulikud tundlikumad turbulentsile kui Savoniuse tüüpi tuulikud. Illustratiivselt on Darrieuse tüüpi elektrituulikud kujutatud joonisel 4 ja 5. Üheks Darrieuse tüüpi tuuliku modifikatsiooniks on H-rootoriga tuulik, millel on kaardus labade asemel kasutatud sirgeid labasid.2526
|
Joonis 3. Savoniuse tüüpi elektrituulik38 |
|
|

|
Joonis 4. Darrieuse tüüpi elektrituulik39 |
|
|

|
Joonis 5. H-rootoriga elektrituulik40 |
|
|

Kaldteljega tuulikud
Kaldteljega tuulikud kasutavad tehnoloogiat, mida eristavad tuule suhtes nurga alla asetatud rootor, kaabliga toetatud labad, rootori keskvõimsuse stardivõrk ja tüüri juhtmega toetatud torn (vt joonis 6). Kuna seda sorti disain ei sisalda kalleid tuuliku komponente nagu näiteks käigukast ja gondel, siis on kaldteljega tuulikuid võrdlemisi odav toota. Ühtlasi on seda tüüpi tuulikud visuaalselt vähem häirivamad tänu oma mõõdetelt kitsamale konstruktsioonile. 27
|
Joonis 6. Kaldteljega tuulik41 |
|
|

Meretuulikud
Tänu hetkelisele kliimapoliitikale (eelkõige Euroopas) on meretuulepargid tõusvas trendis. Meretuuleparkide näol nähakse suurt energiatootmise potentsiaali, kuna merel on tuulekiirused suuremad ja stabiilsemad. Oma ehituselt on meretuulikud sarnased maismaatuulikutele, kuid peamine erinevus seisneb alusvundamendis. Maismaatuulikute puhul on üldjuhul tegu betoonalusel seisva konstruktsiooniga, kuid meretuulikutel võib tuulegeneraatori konstruktsioon paikneda ujuvana vees või kinnitatuna veepõhja. Esmalt on käsitletud erinevaid merepõhja kinnitatud alusvundamendi tüüpe merel:
- 1) Monovaivundament (monopile) – kõige lihtsam ja levinum, nõuab merepõhja drillimist, kasutatav ainult madalas vees (kuni 30 meetrit).
- 2) Kolmjalg vundament (tripod) – kolmjalgne struktuur, stabiilsema konstruktsiooniga kui monovaivundament, raskesti paigaldatav, soovitatav sügavus kuni 40 meetrit.
- 3) ''' Jacket vundament''' – kolmjalgne struktuur, stabiilne ja kergekaaluline (40-50% vähem terast kui monovaivundamendis), soovitatav sügavus kuni 50 meetrit.
- 4) Gravitatsioonivundament (gravity-based) –raudbetoonist vundamendi tüüp, mis hoiab tuulikut püsti raskusjõu mõjul; odav; drillimisvaba, kuid vajab merepõhja ettevalmistust; soovitatav sügavus kuni 40 meetrit. On ka Eestis eelistatud vundamenditüüp, kuna on sobilikum jäätuva ja triivjääga meredes ning samuti on seda tüüpi vundamenti võimalik valmistada kohapeal baassadamas (nt Paldiski, Saaremaa, Sillamäe ja Vana-Pärnu sadamates) [17].28
- 5) ''' Suction bucket’i tüüpi vundament''' – drillimisvaba, kuid ei ole sobilik kõvadele merepõhja pindadele, ei ole suureskaalaliselt paigaldatud.
Teine kategooria tuuliku aluseid on ujuvalused. Ujuvalustel puudub vundament veepõhjas ning selle asemel on turbiin paigutatud vastavalt tüübile poolsukeldunud, pingestusjalgadega (tension legs, TLP) või tugipostidega (spar) platvormile, mida hoitakse paigal erinevate kaldamis- või ankurdamissüsteemidega (joonis 7). Ujuvalused paigutatakse põhiliselt vetesse, kuhu teist tüüpi aluste paigaldamine ei oleks enam kulutõhus (>50-60 meetri sügavused alad). Lisaks veel tagavad seda tüüpi alused väiksemad kulud tänu väiksemale materjalikasutusele ja kergusele. Eelmainitud ujuvaluste tüübid on endiselt arendusel ja optimeerimisel, kuid neist kahte sorti ujuvaluseid on juba katsetatud ja ehitatud suurel skaalal (nt Hywind Project Šotimaal). Nendeks on poolsukelduvad platvormid (semi-submersible platform) ja tugipostidega poid ehk toodrid (spar buoy). Nimetatust viimane on eelkõige sobilik merealadele, mis on rohkem kui 80 meetrit sügavad. Kolmas ujuvaluse tüüp (pingestusjalgadel platvorm, TLP) ei ole veel taolise küpsustasemeni jõudnud. Ujuvaluste disain ja optimeerimine peaks käima käsikäes turbiini disainiga, kuid hetkel veel on vaid vähesed turbiinid disainitud spetsiaalselt ujuvaluse jaoks. On oletatud, et tulevikus võivad vertikaalteljelised tuulikud (vt ülal Tuulikute tüübid) osutuda eelistatuks just ujuvaluste korral tänu oma stabiilsusele. Üheks ujuvaluste positiivseks omaduseks on, et kui veepõhja kinnitatud vundamentide eemaldamine praeguse praktika järgi tähendab vaia või vundamendi osa maha jätmist vette, siis ujuvaluste puhul eemaldatakse kõik. 2930
Ujuvalused on kõige relevantsemad Jaapani ja Ameerika Ühendriikide rannikualadel, mis on tuntud oma pikkade rannajoonte ja järsult langeva merepõhja sügavuse poolest. Eesti seisukohalt aga ei ole ujuvalused eelistatud valik, kuna planeerimisalused merealad ei ületa sügavuspiiri, kus ujuvalus oleks vajalik (territoriaalmere keskmine sügavus on 30 meetrit 31).
|
Joonis 7. Ujuvaluste tüübid42 |
|
|

Tuleviku arendused
Siin antakse ülevaade, kuhu suunas on tuulegeneraatorid liikumas ja mis võivad tulevikus osutuda kõige potentsiaalikamaks tuuleenergia tootmistehnoloogiaks.
- Tuuleenergia õhust (airborne wind energy, AWE) – tuuleenergia tootmise meetod, kus kasutatakse autonoomseid tuulelohesid või droone, mis on lõastatud kaabliga maa külge. Tuulelohede puhul muundatakse mehhaaniline energia elektrienergiaks maapinnal, droonide puhul aga toimub konversioon õhus. Seda tüüpi tuuleenergia tootmine tähendaks väiksemat materjalikasutust ning seega ka madalamaid kulusid. Samuti, tänu võimalusele lennata kõrgematel kõrgustel, on läbi AWE võimalik rakendada tugevamaid ja püsivamaid tuuli, suurendades seeläbi energiatootlikkust. Kirjeldatud tehnoloogia silmitseb enda ees veel mitmeid tehnoloogilisi takistusi ja väljakutseid, mis on peamiselt seotud süsteemi keerukusega ning piiratud teadmistega selles vallas. Õhust tuuleenergia tootmist kujutab joonis 8. 32
- Nutirootorid (smart rotors) – tuuliku konstruktsioon, mille rootorid on võimelised end kohandama vastavalt tuuleoludele (nt tugevamad iilid, turbulentsiaugud, jne). See on eelkõige oluline suure rootoriga tuulikutele (labad üle 70 meetri), kuna tuuletingimused võivad laba ulatuses oluliselt erineda. Läbi nutirootorite on võimalik suurendada või balansseerida elektritootmist ning vähendada tuulikule avalduvat koormust. 33
- Tipurootoritega tuulik – tuulik (joonis 9), millel traditsionaalne pöördemoment käigukastilt generaatorile on asendatud laba tipus paiknevate kiirelt pöörlevate rootor/generaatoritega. Tipurootoritega tuulikul ei ole tarvis põhivõlli ega käigukasti, mis tagab kergema kaalu ning ka väiksemad kulud. See tehnoloogia on eelkõige sobilik suuremõõtmelistele tuulikutele. Kuna tehnoloogial tekitab rohkem müra ja avaldab suuremat visuaalset mõju, on see sobilikum merealadele. 34
- Mitme rootoriga tuulik – tuulik (joonis 10), millel üks suur rootor on asendatud mitme väiksemõõtmelise rootoriga. Selline tehnoloogia lubab ühele tuulikule paigaldada 20 MW või enama energiatootlusega rootorit. Lisaks veel on taoliste rootorite massiline tootmine kergem, kuna need ei vaja kohandamist. Hetkel suurim teadaolev seda sorti tuuliku projekt Euroopas on 900 kW-se tootmisvõimsusega neljarootoriline turbiin Vestase poolt. 35
-
Joonis 8. Õhust tuuleenergia tootmise meetodid43

Joonis 9. Tipurootoritega tuulik44

Joonis 10. Mitme rootoriga tuulik45

Täiendavat lugemist
Viited
- Majandus- ja Kommunikatsiooniministeerium. Eesti elektrimajanduse arengukava 2008 - 2018.↩︎
- Muiste, M., Veskimägi, J. Hea Uus Linn OÜ. Tuule ja päikeseenergia kasutamine Tartu linnas.↩︎
- IRENA. (2020). Renewable Energy Statistics 2020. Abu Dhabi. Kättesaadav: https://www.irena.org/-/media/Files/IRENA/Agency/Publication/2020/Mar/IRENA_RE_Capacity_Statistics_2020.pdf↩︎
- Eesti Tuuleenergia Assotsiatsioon. Kuidas elektrituulik töötab?.↩︎
- Watson, S., Moro, A., Reis, V., Baniotopoulos, C., Barth, S., & Bartoli, G. et al. (2019). Future emerging technologies in the wind power sector: A European perspective. Renewable And Sustainable Energy Reviews, 113, 109270. DOI:https://doi.org/10.1016/j.rser.2019.109270↩︎
- Rehman, S., Alam, M., Alhems, L., & Rafique, M. (2018). Horizontal Axis Wind Turbine Blade Design Methodologies for Efficiency Enhancement—A Review. Energies, 11(3), 506. DOI:https://doi.org/10.3390/en11030506↩︎
- Alaru, M. (2010). Inglise-eesti-hispaania tuuleenergia sõnastik. Kättesaadav: http://dspace.ut.ee/bitstream/handle/10062/17208/Alaru_Malle.pdf↩︎
- How Long Are Wind Turbine Blades? - Clean Energy Ideas. (2019). Kättesaadav: https://www.clean-energy-ideas.com/wind/wind-turbines/how-long-are-wind-turbine-blades/↩︎
- What is a wind class?. (2020). Kättesaadav: https://www.lmwindpower.com/en/stories-and-press/stories/learn-about-wind/what-is-a-wind-class↩︎
- Zhang, M, H. (2015). IEC Classification of Wind Turbines. Wind Resource Assessment and Micro-siting, Science and Engineering, First Edition. Kättesaadav: https://onlinelibrary.wiley.com/doi/pdf/10.1002/9781118900116.app2↩︎
- IRENA. (2016). Wind Power: Technology Brief. Kättesaadav: https://www.irena.org/-/media/Files/IRENA/Agency/Publication/2016/IRENA-ETSAP_Tech_Brief_Wind_Power_E07.pdf↩︎
- Eesti Tuuleenergia Assotsiatsioon.(2014) Horisontaalteljega elektrituulik. Kättesaadav: http://www.tuuleenergia.ee/wp-content/uploads/Virtsu-3.jpg↩︎
- Zemamou, M., Aggour, M. and Toumi, A., 2017. Review of savonius wind turbine design and performance. Energy Procedia, 141, pp.383-388.↩︎
- Hashem, I. and Mohamed, M., 2018. Aerodynamic performance enhancements of H-rotor Darrieus wind turbine. Energy, 142, pp.531-545.↩︎
- Goldstein, L. (2015). A proposal and a theoretical analysis of a novel concept of a tilted-axis wind turbine. Energy, 84 , pp. 247-254. DOI: https://doi.org/10.1016/j.energy.2015.02.110↩︎
- Hendrikson. (2018). Eesti mereala planeeringu lähteseisukohad ja mõjude hindamise väljatöötamise kavatsus. Kättesaadav:http://mereala.hendrikson.ee/dokumendid/Lähteseisukohad/LS_KSH_VTK_oktoober_2018.pdf↩︎
- Eesti Tuuleenergia Assotsiatsioon. Horisontaalteljega elektrituulik. (23.10.2014)↩︎
- S. P. da Costa, M., Kesby, J., & Clausen, P. (2019). Structural Optimisation of 3D Printed Small Diffuser Augmented Wind Turbine Blade Using Bi-directional Evolutionary Layout Optimisation Method. Wind Energy Exploitation In Urban Environment, 215-228.Hajutiga tuulik.↩︎
- Basis Africa. Savonius tüüpi elektrituulik. (23.10.2014)↩︎
- Bright Hub. Darrieuse tüüpi elektrituulik. (23.10.2014)↩︎
- DIYTrade. H-rootoriga elektrituulik. (23.10.2014)↩︎
- Dornhelm, Esther & Seyr, Helene & Muskulus, Michael. (2019). Vindby—A Serious Offshore Wind Farm Design Game. Energies. 12. 1499. Kättesaadav: https://www.researchgate.net/figure/Types-of-support-structure-concepts-From-left-to-right-monopile-gravity-based-jacket_fig2_332590931↩︎
- Cherubini, A., Papini, A., Vertechy, R. and Fontana, M. (2015). Airborne Wind Energy Systems: A review of the technologies. Renewable and Sustainable Energy Reviews, 51, pp.1461-1476. AWE↩︎
{kind=link}
{kind=link}
{kind=link}
{kind=link}